在智能交通領域�,車輛列隊行駛是提高道路安全性和效率的重要方式。然而��,由于車輛之間的通信可能受到各種不可靠因素的影響����,如延遲、丟包等����,因此設計一種具有魯棒性的車輛列隊行駛控制模型是當前的研究重點。
近日���,斯?jié)櫶炖实募夹g(shù)團隊在論文《A hybrid control methodology for vehicle platooning based on linearized decoupled control law》中提出了一種創(chuàng)新的車輛列隊行駛混合控制模型,此模型綜合考慮了V2X通信延遲�����、丟包等不可靠因素,同時也大大降低了V2X網(wǎng)聯(lián)環(huán)境下通信延遲�、車輛執(zhí)行器延遲問題對車輛編隊穩(wěn)定性所產(chǎn)生的不利影響。
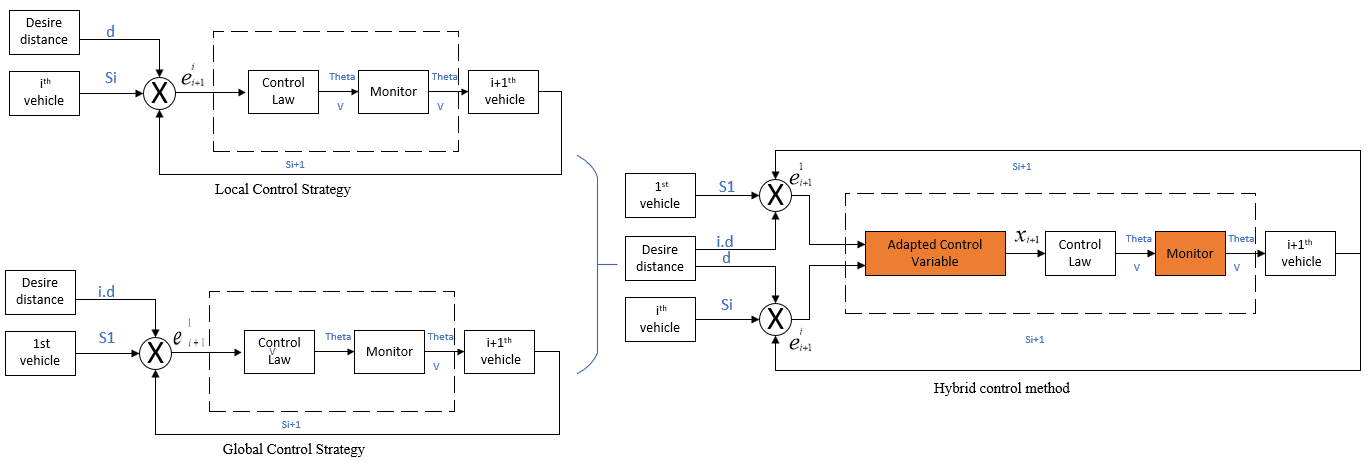
圖|車輛列隊行駛混合控制模型
該模型由全局控制器和局部控制器相互耦合而成���,可以根據(jù)V2X通信質(zhì)量進行自適應切換。這種設計不僅考慮了車隊運行的整體狀態(tài)���,而且增加了對車與車之間局部狀態(tài)的感知��,大大降低了V2X網(wǎng)聯(lián)環(huán)境下通信延遲�����、車輛執(zhí)行器延遲問題對車輛編隊穩(wěn)定性所產(chǎn)生的不利影響��。此外����,模型還引入了速度/加速度監(jiān)測模塊��,極大地提升了單車控制的穩(wěn)定性和車隊整體的抗干擾能力�����。
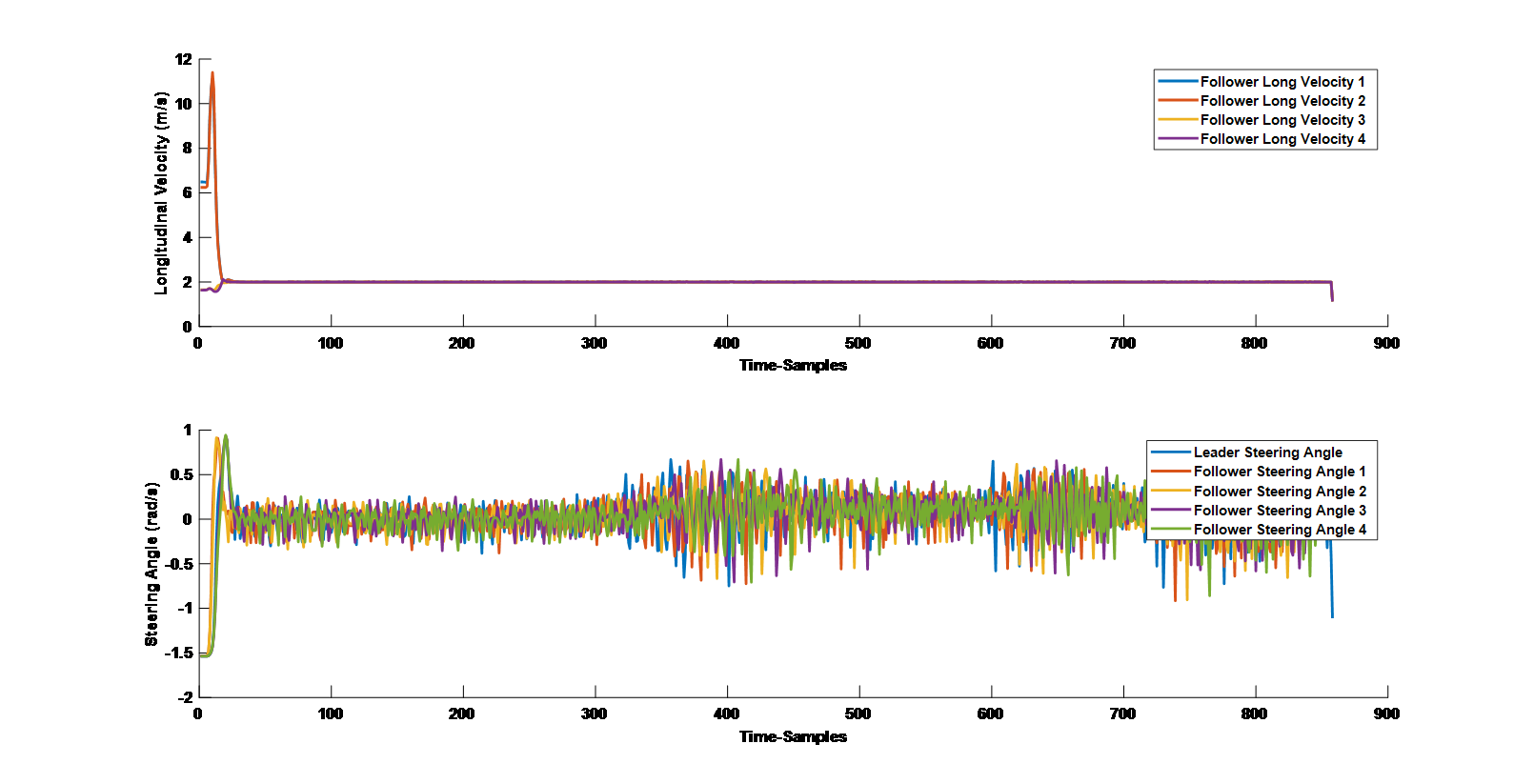
圖|縱向速度&方向盤轉(zhuǎn)角
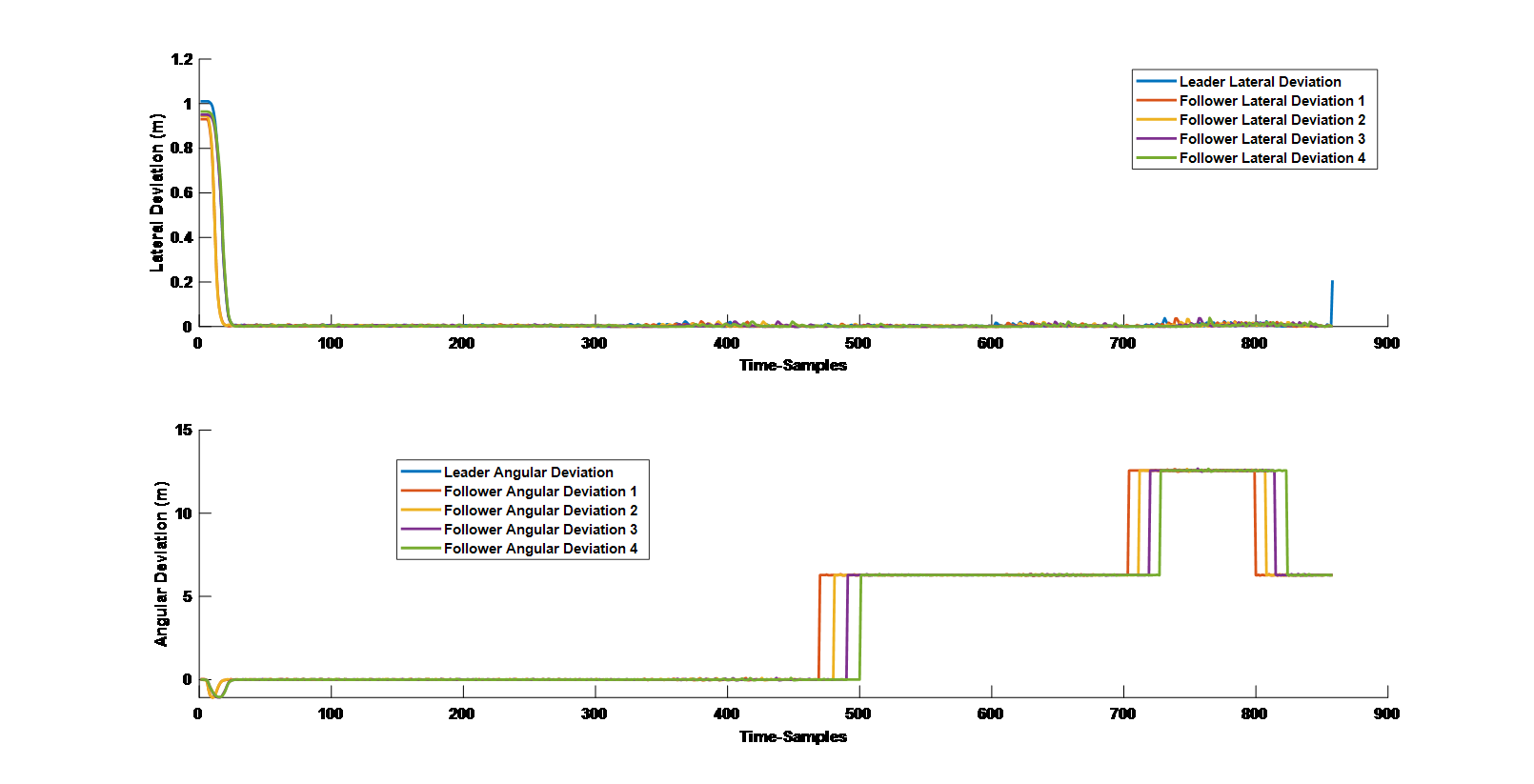
圖|橫向&方向盤偏差
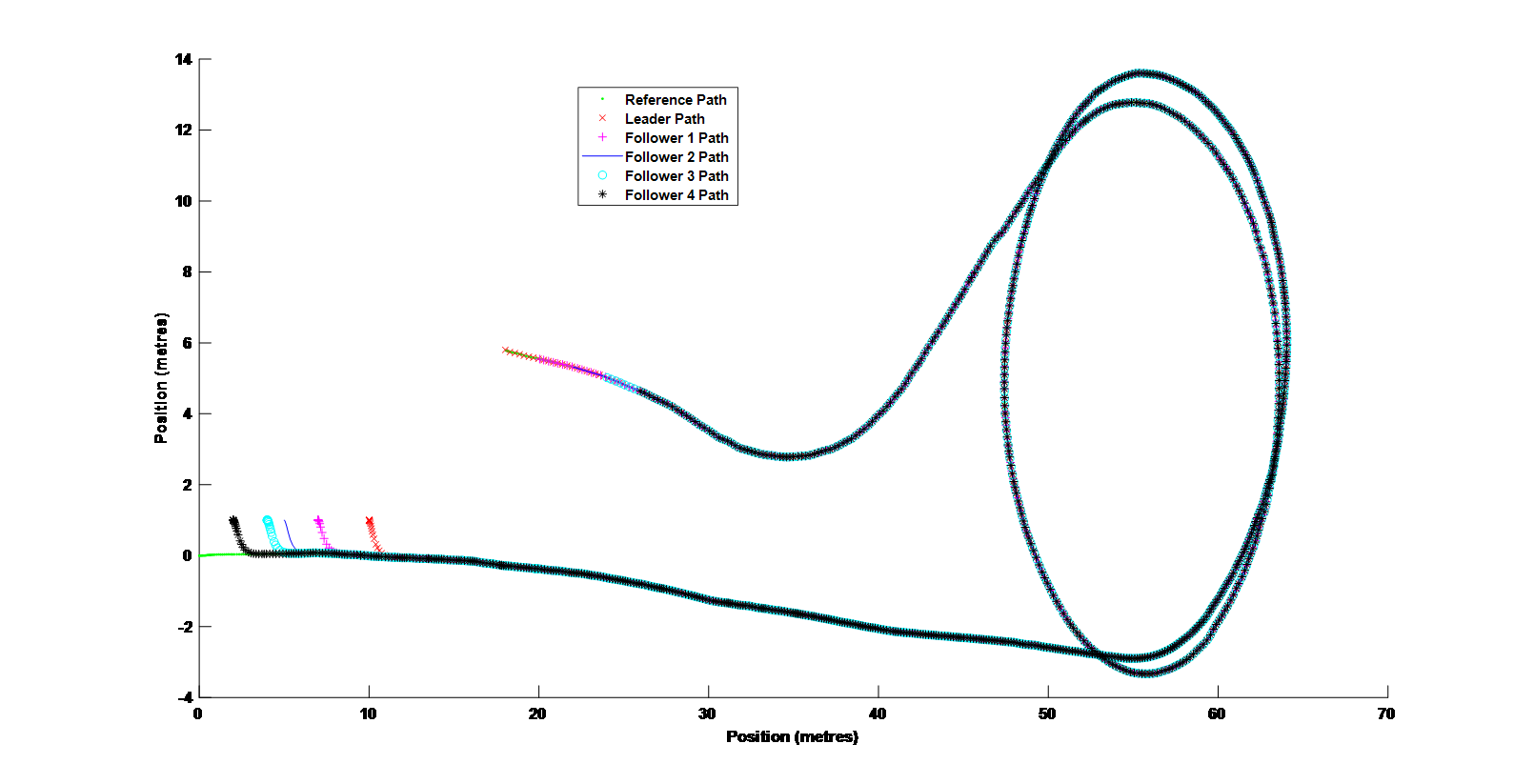
圖|路徑跟蹤結(jié)果
由模型的仿真結(jié)果可以看出�,車隊中各個車輛的縱向速度��、橫向方向盤轉(zhuǎn)角能夠保持比較好的一致性�����,路徑跟蹤也取得了比較好的效果��,驗證了本論文所提出的混合控制算法的有效性��。
經(jīng)過ITS國際組委會的專業(yè)遴選�����,該論文成功入選第29屆智能交通世界大會�。10月20日上午�����,斯?jié)櫶炖蕦⑹苎麉⒓蛹夹g(shù)論文會議:TS37 Platooning���,屆時將對論文內(nèi)容進行技術(shù)解讀�,并介紹斯?jié)櫶炖试?/span>V2X網(wǎng)聯(lián)環(huán)境下車輛列隊行駛方面所做的相關工作。
會議議程
智能交通世界大會由亞太����、美洲���、歐洲地區(qū)智能交通國際組織發(fā)起����,是智能交通領域最具影響力的國際會議����,也被稱為智能交通界的“奧運會”,是交通前沿技術(shù)和產(chǎn)品展示平臺�����。本屆大會以“智能交通美好生活”為主題�,將有多場重要會議,嘉賓將分享智能交通關鍵問題的全球性觀點����,推動智能交通領域前沿技術(shù)的研究和系統(tǒng)應用。

第29屆智能交通世界大會
斯?jié)櫶炖?/span>始終專注于智能網(wǎng)聯(lián)汽車領域的研發(fā)與推廣����,致力于為客戶提供全球領先的車聯(lián)網(wǎng)解決方案和優(yōu)質(zhì)的服務。作為智能網(wǎng)聯(lián)產(chǎn)業(yè)的領軍企業(yè)之一�,斯?jié)櫶炖势诖ㄟ^這次會議與全球的智能交通領域的專家學者進行深入的交流和分享�����,共同推動車輛列隊行駛控制技術(shù)的發(fā)展���,同時也期待斯?jié)櫶炖试谥悄芙煌I域做出更多的貢獻���。
